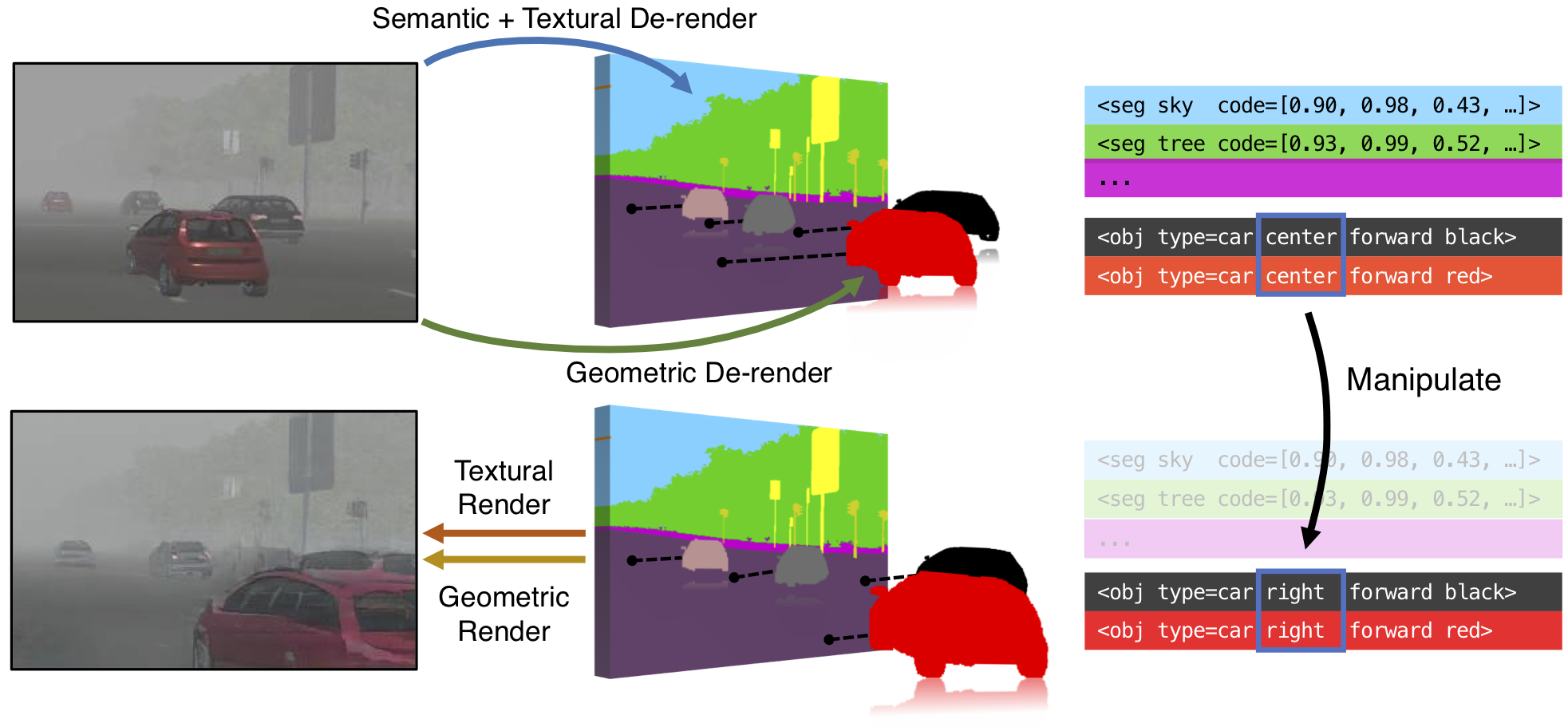
Manipulation example: We propose to learn a holistic scene representation that encodes scene semantics as well as 3D and textural information. Our encoder-decoder framework learns disentangled representations for image reconstruction and 3D-aware image editing. For example, we can move cars to various locations with new 3D poses.

Abstract
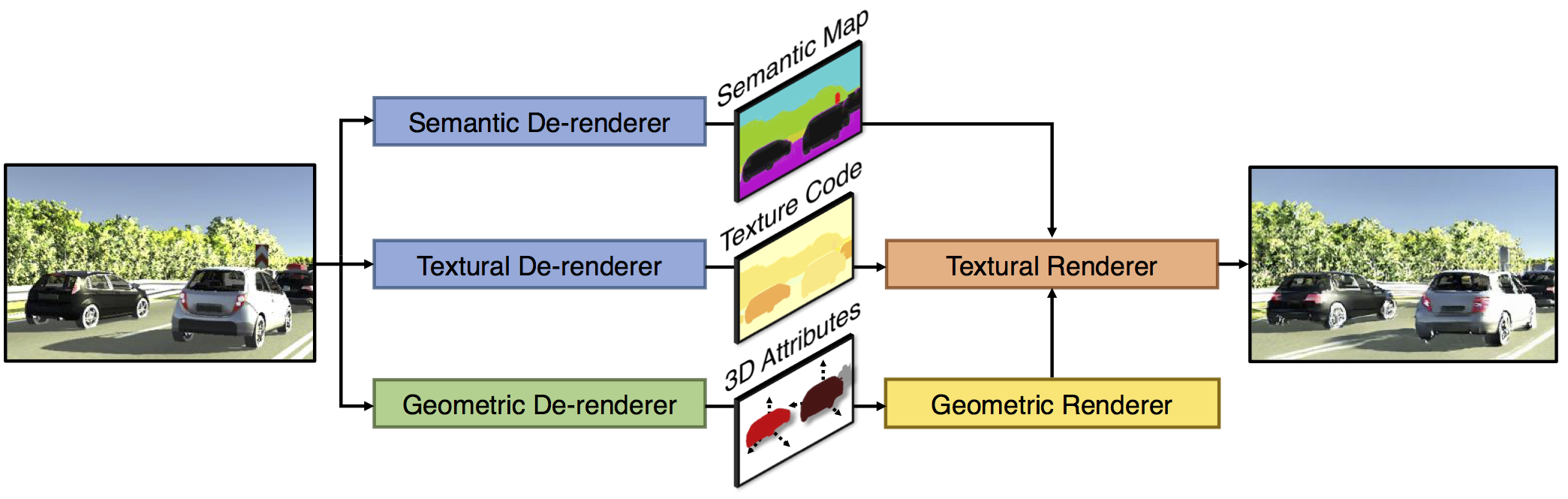
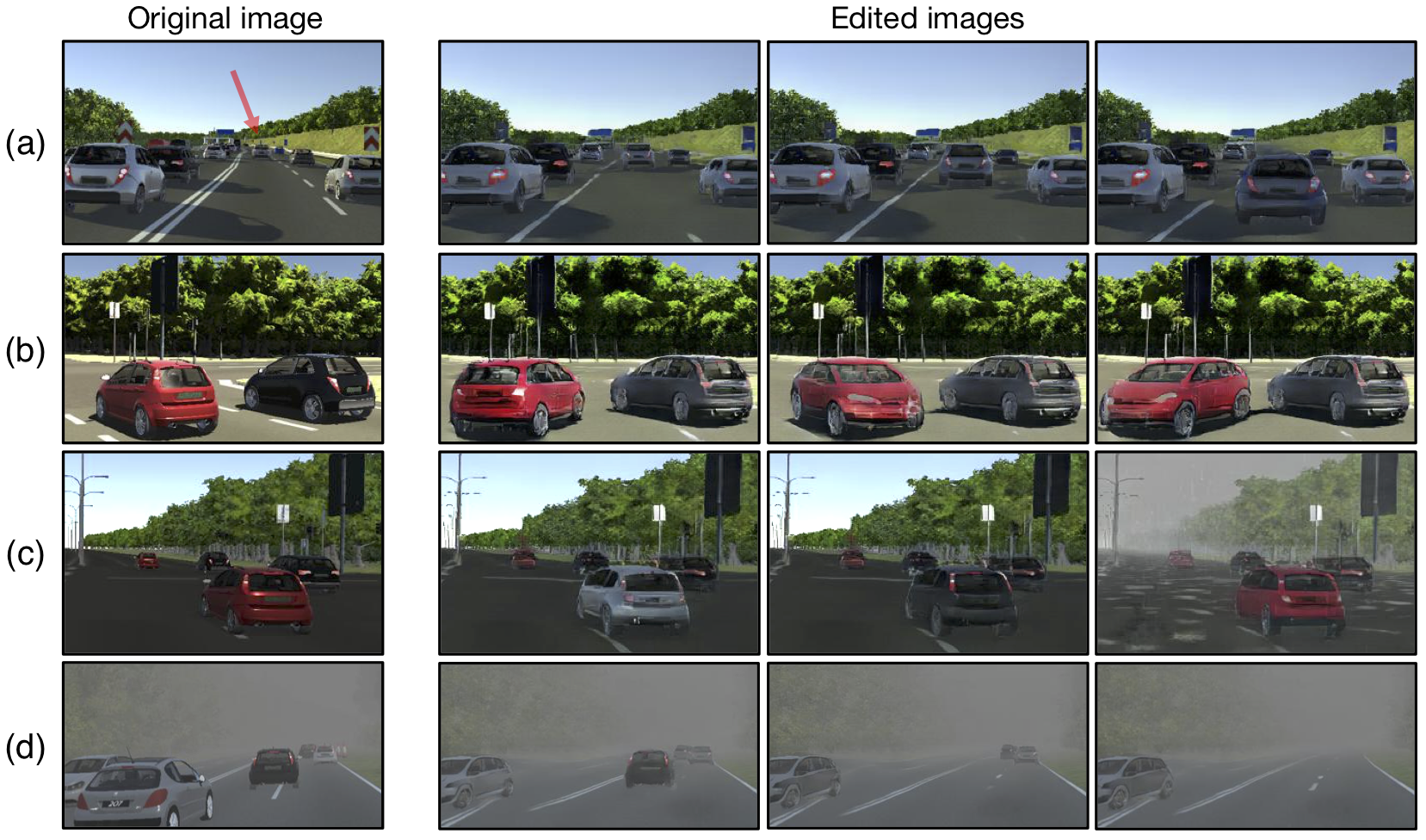
We aim to obtain an interpretable, expressive, and disentangled scene representation that contains comprehensive structural and textural information for each object. Previous scene representations learned by neural networks are often uninterpretable, limited to a single object, or lacking 3D knowledge. In this work, we propose 3D scene de-rendering networks (3D-SDN) to address the above issues by integrating disentangled representations for semantics, geometry, and appearance into a deep generative model. Our scene encoder performs inverse graphics, translating a scene into a structured object-wise representation. Our decoder has two components: a differentiable shape renderer and a neural texture generator. The disentanglement of semantics, geometry, and appearance supports 3D-aware scene manipulation, e.g., rotating and moving objects freely while keeping the consistent shape and texture, and changing the object appearance without affecting its shape. Experiments demonstrate that our editing scheme based on 3D-SDN is superior to its 2D counterpart.